柔性压力传感器因其在人形机器人、生物医疗和人机交互等前沿领域的巨大应用潜力而备受关注。其中,电容式压力传感器以其低功耗、高稳定性等优点成为研究热点,但其性能(尤其是灵敏度和线性度)长期以来受限于传统的设计思路。这极大地制约了其在需要精确力反馈与动态控制的复杂场景中的应用。
针对这一挑战,北京大学电子学院胡又凡-彭练矛团队提出了一种全新的“接触主导的局域电位移场增强”设计策略。该策略通过巧妙地设计传感器结构,成功地在宽压力范围内同时实现了超高的灵敏度、极佳的线性度和广阔的传感范围。这一设计包含两个核心要素:一是由鲁棒的导电复合材料与金属覆盖层构成的分级微结构电极;二是通过薄层或高介电常数(high-k)材料实现的具有高单位面积电容的介电层。这种设计使得传感器的电容变化主要由接触区域的局域增强电场主导,从而突破了传统传感器的性能瓶颈。
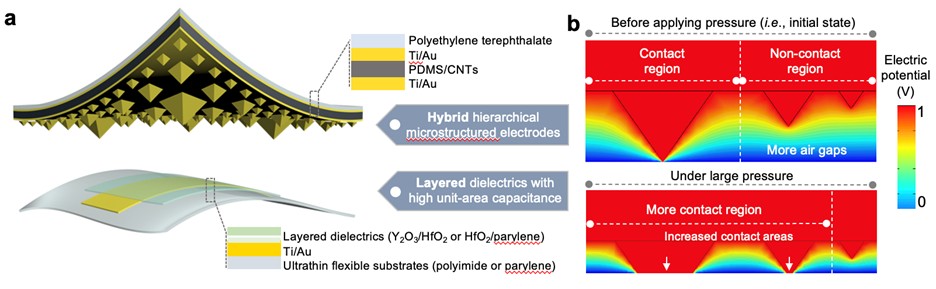
图1. 接触主导的局域电位移场增强型压力传感器。a, 传感器结构示意图,展示了分级微结构电极与高单位面积电容的介电层。b, 施加压力之前和高压下的电势分布的横截面图。
该团队研制的传感器展现了世界领先的性能。其压力响应(归一化电容变化量)超过3000,比以往的最高纪录提升了一个数量级以上;传感范围超过1兆帕(MPa),部分器件可达2兆帕。尤为突出的是,该传感器在0-100千帕(kPa)的宽压力范围内,实现了高达9.22 kPa⁻¹的灵敏度和0.9998的近乎完美的线性度(R²值)。此外,该传感器还展示了出色的机械鲁棒性、对微小压力(0.1帕)的超高分辨率以及快速响应能力(约15毫秒)。
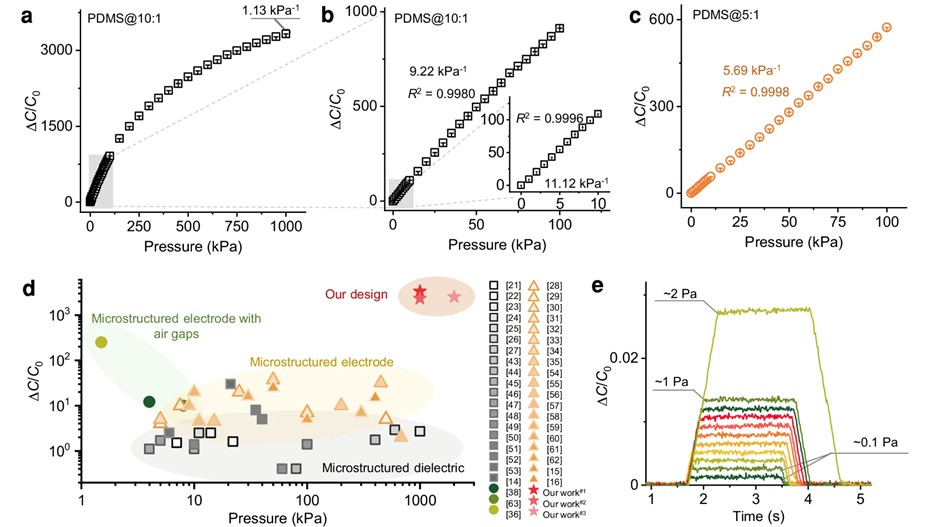
图2. 接触主导的压力传感器的性能表征。a-c, 传感器的归一化电容变化与压力关系曲线,展示了其超高的响应和优异的线性度。d, 与此前各类微结构压力传感器相比,该设计在灵敏度和响应范围上均实现了突破。e,小压力下的压力响应,可以分辨出~1 Pa时归一化电容变化的十分之一(即~0.1 Pa)。
研究进一步揭示了该设计的工作机理。分级微结构确保了在不同压力下,总有新的微结构参与接触,从而将材料的应变保持在线性区域内,保证了宽范围的线性响应。而“导电复合材料+金属覆盖层”的混合电极设计,则巧妙地解决了薄金属层在形变下容易开裂失效的问题,保证了信号的稳定与可靠。基于其卓越的性能,团队将此传感器与柔性低维半导体晶体管集成,在2.66伏的低工作电压下,实现了高达4x10⁵的电学响应,充分利用了晶体管的开关比,极大地提升了集成器件的信噪比。
团队通过两个典型应用场景展示了该技术的巨大潜力。在流体物理性质评估中,搭载该传感器的机械臂能够精确测量不同液体的静水压,从而估算其密度,并能捕捉到液滴表面张力引起的微小动态变化。在机器人操控任务中,集成该传感器的机械手能够根据物体的刚度自适应地控制抓取力,无论是柔软的棉花还是坚硬的乒乓球都能稳定抓取且不变形,甚至能在物体滑落时进行动态调整,其压力分辨率比人类皮肤高出一个数量级。
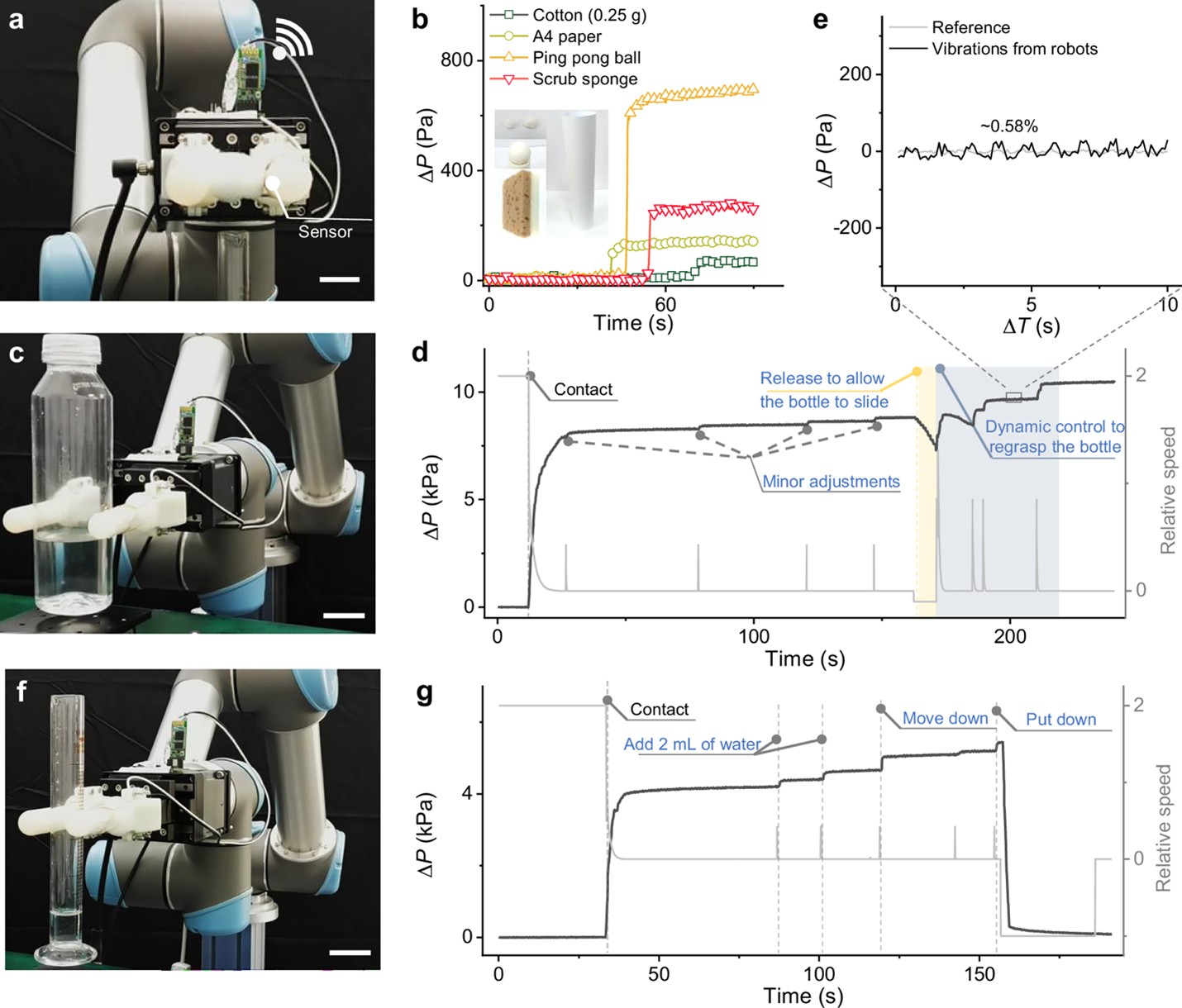
图3. 压力传感器在机器人精准操控中的应用。a,配备传感器的机械手抓取棉花的照片。b,抓取各种物体时压力变化的动态。c,配备传感器的机械手抓取装有水的瓶子的照片。d,抓取和提起瓶子以及发生滑落时的压力变化和速度调整。e,传感器检测到的机械振动引起的测量压力变化。f,配备传感器的机械手夹持器抓取装满水的量筒的照片。g,抓取量筒时夹持器的压力变化和速度调整。
以上相关成果以《接触主导的局域电位移场增强型压力传感》(Contact-dominated localized electric-displacement-field-enhanced pressure sensing)为题,于2025年8月29日在线发表于《自然·通讯》(Nature Communications)。该项研究得到了国家重点研发计划、国家自然科学基金等项目以及纳米器件物理与化学教育部重点实验室的支持。北京大学电子学院博士后马超、湖南先进传感与信息技术研究院硕士生叶怀东、东南大学机械工程学院硕士生史晓微和北京大学电子学院博士生陈雨凡为论文共同第一作者,胡又凡长聘副教授和彭练矛院士为论文共同通讯作者。该成果为下一代高性能柔性电子学、智能机器人和人机交互系统的发展提供了关键的技术支撑,有望推动其在更广泛领域的创新应用。