6月10日,触觉感知和反馈技术的发展推动了人与数字世界的互动,催生了虚拟现实、增强现实、残疾辅助和通信等领域的创新应用。当前,表面触觉反馈器件主要通过电刺激和机械振动两种机制实现。电刺激利用电流直接刺激神经,将信号传递至大脑,但存在用户体验不一致、皮肤疼痛、肌肉反应及暂时性感觉迟钝等问题。相比之下,柔性机械执行器则通过皮肤变形传递触觉信息,更安全且无需紧密贴合,提升了用户与环境交互的自由度。然而,这类执行器通常采用介电弹性体、压电材料等柔性功能材料,依赖千伏级高压电源驱动,存在安全隐患并且限制了多维触觉反馈信息的编辑能力。因此,开发低电压驱动与高可编程性的触觉反馈器件以实现复杂情感交互和动态指令交互的需求日益迫切。
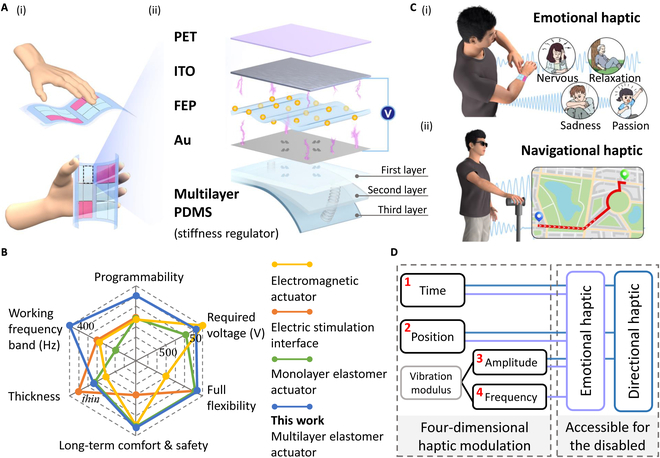
器件原理及应用场景示意图
为了解决这一问题,清华大学深圳国际研究生院智能仪器与装备研究所钱翔课题组提出了一种基于多层可变刚度聚二甲基硅氧烷(polydimethylsiloxane, PDMS)弹性体的柔性驻极体触觉反馈执行器。该执行器由五层三明治结构组成(如图1A所示),包括聚对苯二甲酸乙二醇酯(polyethylene terephthalate, PET)封装层、氧化铟锡(indium tin oxide, ITO)上电极层、氟化乙丙烯(fluorinated ethylene propylene, FEP)驻极体薄膜层、金电极层以及PDMS复合刚度调控层(stiffness regulator)。课题组在之前的工作中已经发现,通过调节单层PDMS支撑层的参数,可以有效调控驻极体执行器产生机械振动的强度和频率,实现触觉信息的编码。而在本研究中,课题组通过有选择地改变多层PDMS弹性体的交联密度而实现“变刚度复合”这一概念。
实验结果表明,该执行器具有优秀的输出特性,实现超低电压驱动,能够在低至5V驱动电压下产生可感知的触觉反馈力;实现高增益,在200V驱动电压下增益为1.06mN/V,在35V驱动电压下增益为0.98mN/V;实现宽频率,执行器的带宽在50Hz至450Hz范围内,涵盖了主要的触觉敏感的频率范围。
在此基础上,研究设计并实现了六点阵执行器阵列系统,具备独特的四维(4D)触觉编程能力,涵盖了时间(振动启动/持续/停止时间)、位置、振幅和频率(如图1D所示)。本研究进一步展示了该执行器阵列系统的两项应用场景。
首先,通过将触觉反馈“节奏”(rhythm)参数,即调控频率、振动持续时间和停顿时间,以对应情绪的激烈程度;将触觉反馈的“平滑度”(smoothness)参数,即调控振幅的变化率,以对应情绪的愉悦程度。由此获得了三种节奏模式(R1、R2和R3)以及四种平滑度编程模式(S1、S2、S3和S4),利用这些模式的组合能够在动态输出盲文字符的基础上加载 “热情” “紧张”“悲伤”和“放松”等情绪信息(如图1C所示)。其次,通过调节阵列各点间的振动时序和振幅水平以使用户产生流动感的幻触觉,调控的关键参数包括两个执行器单元之间的致动流动方向(AFD)、致动起始时间(AOT)、重叠振动时间(OVT)以及致动振幅(A)。基于此,本研究给出了五种动作方向:前进/后退、左/右、顺时针、斜向前和到达。课题组未来将进一步探索该系统在盲人辅助以及沉浸式虚拟操作中的应用。
相关研究成果以“面向残障人群感知增强的情感性与方向性可编程柔性触觉接口”(Emotional and Directional Enabled Programmable Flexible Haptic Interface for Enhanced Cognition in Disabled Community)为题,于6月3日发表于中国科学技术协会(China Association for Science and Technology, CAST)与美国科学促进会(American Association for the Advancement of Science,AAAS)合作期刊《研究》(Research)上。
清华大学深圳国际研究生院2020级硕士生柳雨含(已毕业)、2021级博士生韩留洋为论文共同第一作者,钱翔和澳门大学科技学院机电工程系助理教授钟俊文为论文共同通讯作者。研究得到深圳市技术攻关项目等的支持。